Die CANgineBerry
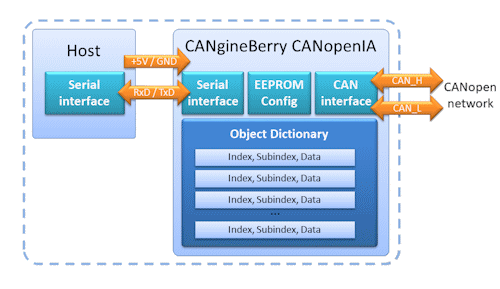
Das serielle Protokoll zwischen Host und CANopenIA ist das CANopen Remote Access Protocol von Embedded Systems Academy. Es unterstützt das Melden von Ereignissen (neue Daten auf der CANopen-Seite) sowie das Lesen und Schreiben von Daten des lokalen Objektverzeichnisses (Object Dictionary).
Der CANopen-Manager führt automatische Netzwerk-Scans durch und vereinfacht so den Anwendungscode, da er direkt auf die gescannten Daten zugreifen kann.
CANopen-Manager-Implementierungen unterstützen außerdem den Lese- und Schreibzugriff auf Objektverzeichnis-Einträge jedes an das CANopen-Netzwerk angeschlossenen Knotens. Weitere Informationen finden Sie auf unserer eigenen Webseite unter www.canopenia.com.
Haeufig gestellte Fragen
Mit welchen Raspberry-Pi-Modellen funktioniert die CANgineBerry?
Mit jedem Raspberry Pi mit 40-Pin-GPIO-Header: dem Raspberry Pi 2 und allen späteren Modellen, einschließlich Pi 4 und Pi 5, sowie der Pi-Zero-Familie. Sie nutzt die 5-V-Pins und den primären UART an GPIO14/GPIO15. Beim Pi 3 und später deaktivieren Sie das integrierte Bluetooth und sprechen das Modul über /dev/serial0 an.
Unterstützt die CANgineBerry CAN FD?
Nein. Die CANgineBerry ist ein Gerät für klassisches CAN und CANopen. CAN FD wird nicht unterstützt.
Welche Firmware-Optionen sind verfügbar?
Ein generischer, minimaler CANopen-Manager/Controller und ein CANopenIA-Device, beide auf CANopenIA basierend, sowie eine CANcrypt-gesicherte Variante des Lawicel-Protokolls (CAN232/SLCAN). Eine Firmware zur CANopen-Sicherheits-Anomalie-Erkennung ist demnächst verfügbar.
Wie kommuniziert der Host mit dem Modul?
Über einen regulären UART mit dem CANopen Remote Access Protocol. Der Host liest und schreibt Objektverzeichnis-Einträge und empfängt Ereignisse, während das Modul das CAN-Protokoll auf seinem eigenen 32-Bit-Mikrocontroller mit Reaktionszeiten unter 10 ms ausführt.