The CANgineBerry
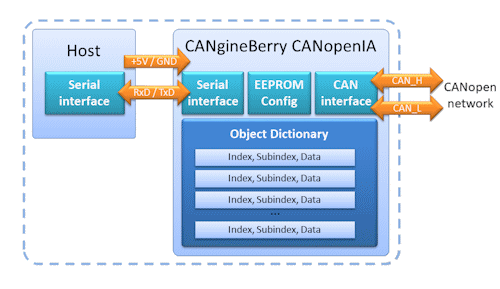
The serial protocol between host and CANopenIA is the CANopen remote access protocol by Embedded Systems Academy. It supports reporting events (new data arrived on CANopen side) as well as reading and writing data of the local Object Dictionary.
The CANopen Manager performs automatic network scans, simplifying application code as it can directly access the data scanned.
CANopen Manager implementations also support read and write accesses to Object Dictionary entries of any node connected to the CANopen network. For more information visit our dedicated web page at www.canopenia.com.
Frequently Asked Questions
Which Raspberry Pi models does the CANgineBerry work with?
Any Raspberry Pi with the 40-pin GPIO header: the Raspberry Pi 2 and all later models, including the Pi 4 and Pi 5, plus the Pi Zero family. It uses the 5 V pins and the primary UART on GPIO14/GPIO15. On the Pi 3 and later, disable the onboard Bluetooth and address the module through /dev/serial0 for reliable serial.
Does the CANgineBerry support CAN FD?
No. The CANgineBerry is a classical CAN and CANopen device. CAN FD is not supported.
Which firmware options are available?
A generic minimal CANopen Manager/Controller and a CANopenIA Device, both based on CANopenIA, and a CANcrypt-secured version of the Lawicel protocol (CAN232/SLCAN). A CANopen security anomaly-detection firmware is available soon.
How does the host communicate with the module?
Over a regular UART using the CANopen remote access protocol. The host reads and writes Object Dictionary entries and receives events, while the module runs the CAN protocol on its own 32-bit microcontroller with response times under 10 ms.